

No dia 19 de janeiro de 2024, a Agência Japonesa de Exploração Aeroespacial (JAXA), em parceria com universidades e empresas privadas, levou à superfície lunar um pequeno robô capaz de mudar de forma. Batizado de SORA-Q, o equipamento foi transportado pela missão SLIM, que havia decolado em dezembro de 2023 e realizado o pouso no satélite natural na data prevista.
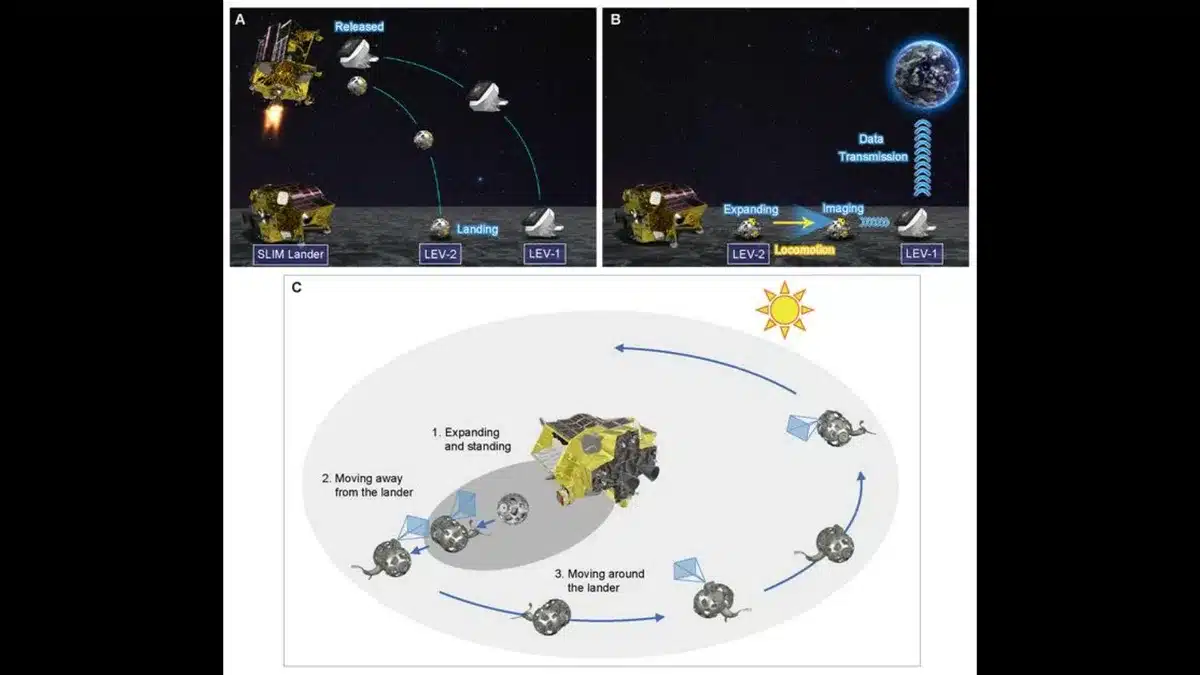
Com cerca de 8 centímetros de diâmetro, o SORA-Q foi concebido para se transformar automaticamente ao tocar o solo lunar. Inicialmente com configuração esférica, o robô abre suas metades para formar um corpo cilíndrico e utilizar as faces convexas como rodas. Durante o deslocamento, uma câmera frontal projeta-se para capturar imagens do terreno, enquanto uma estrutura traseira funciona como estabilizador.
Finalidade e tecnologias empregadas
O desenvolvimento do SORA-Q envolveu colaborações entre a JAXA, a Sony, a Doshisha University e a fabricante de brinquedos Takara-Tomy. O objetivo central foi testar navegação autônoma em ambiente lunar e comunicação em cadeia a partir da superfície até a Terra. Para isso, o robô operou em conjunto com um segundo dispositivo encarregado de retransmitir os sinais recebidos até as estações de solo, possibilitando o envio de dados mesmo sem contato direto com a base terrestre.
Operação na região de Mare Nectaris
A área de atuação do SORA-Q fica próxima ao ponto de pouso do módulo SLIM, no hemisfério visível da Lua. O campo geológico inclui formações como a cratera Shioli, inserida na bacia Cyrillus, na região de Mare Nectaris. Durante cerca de 100 minutos de operação, o robô analisou o terreno por meio de imagens capturadas localmente, identificando obstáculos naturais, como crateras e irregularidades, para ajustar sua rota de forma autônoma e reduzir a dependência de comandos enviados da Terra.
A missão teve sua atividade interrompida antes do tempo planejado, possivelmente em função de falha na bateria ou danos no sistema auxiliar de locomoção. Os resultados iniciais, porém, apontam para avanços significativos em mobilidade autônoma em escala reduzida, coleta de imagens e transmissão sem fio na superfície lunar.

Imagem: Imagem ilustrativa
Os detalhes da pesquisa estão descritos em artigo publicado na revista Science Robotics, que apresenta comprovações sobre a capacidade do robô de operar sem controle remoto direto e de realizar a troca de informações entre múltiplos equipamentos em ambiente extraterrestre.
Com informações de Olhardigital


